//code from chat gpt
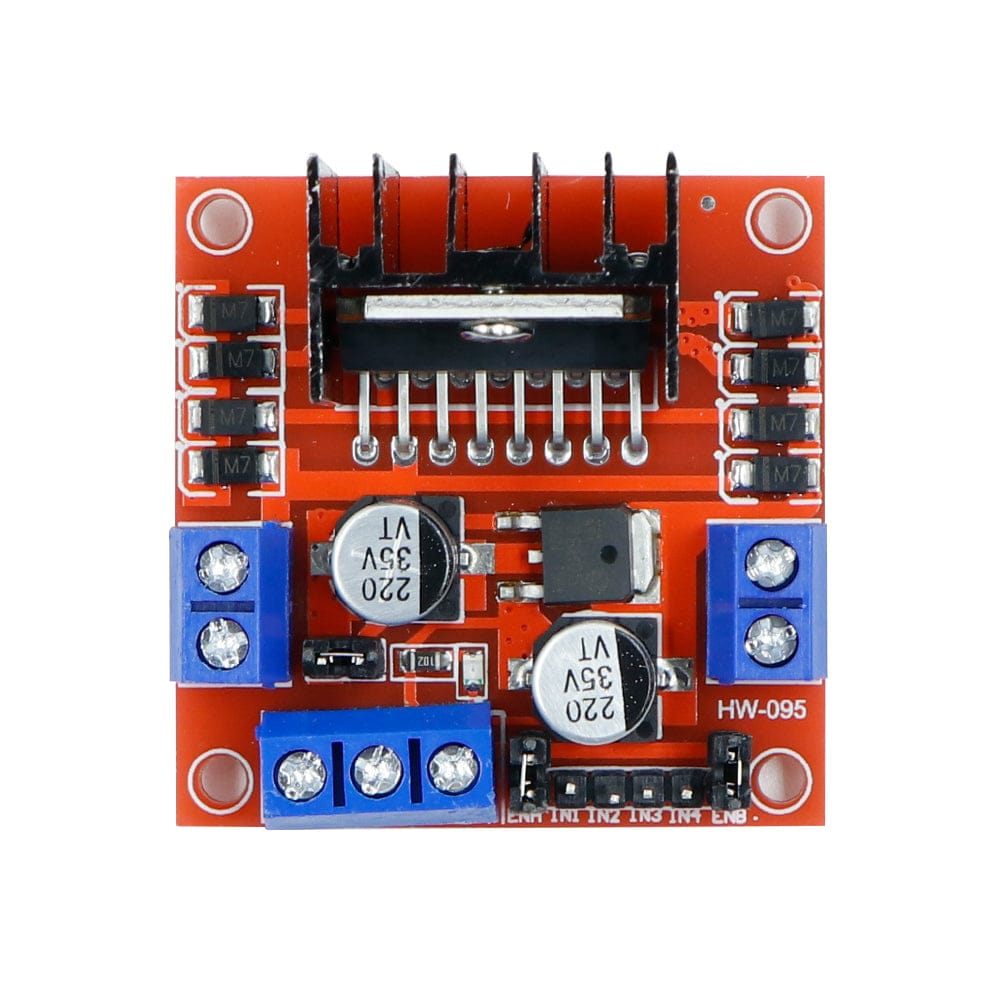
// Define the motor driver pins connected to the Arduino
#define IN1 8 // Input 1 for Motor A
#define IN2 7 // Input 2 for Motor A
#define IN3 6 // Input 1 for Motor B
#define IN4 5 // Input 2 for Motor B
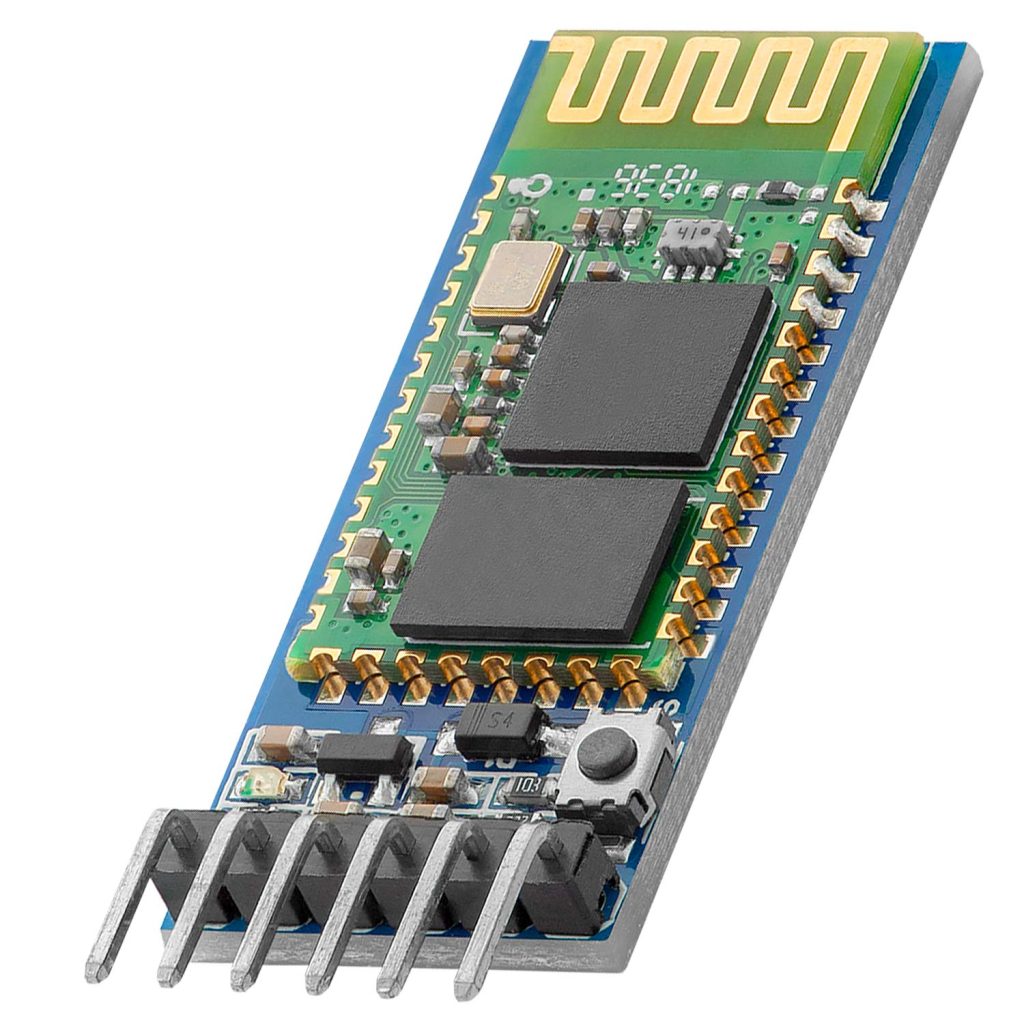
// Bluetooth module pin
#define bluetoothSerial Serial
void setup() {
// Set all motor driver pins as output
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
// Start serial communication at 9600 baud rate
bluetoothSerial.begin(9600);}
void loop() {
// Check if there is any data available from the Bluetooth module
if (bluetoothSerial.available()) {
char command = bluetoothSerial.read(); // Read the incoming data
// Control the car based on the command received
switch (command) {
case 'F': // Move Forward
moveForward();
break;
case 'B': // Move Backward
moveBackward();
break;
case 'L': // Turn Left
turnLeft();
break;
case 'R': // Turn Right
turnRight();
break;
case 'S': // Stop the car
stopCar();
break;}}}
// Function to move the car forward
void moveForward() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);}
// Function to move the car backward
void moveBackward() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);}
// Function to turn the car left
void turnLeft() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);}
// Function to turn the car right
void turnRight() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
// Function to stop the car
void stopCar() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}